The European research project BADGER (roBot for Autonomous unDerGround trenchless opERations, mapping and navigation), coordinated by the Universidad Carlos III de Madrid (UC3M), has presented a prototype of an autonomous underground robot with intelligent navigation for urban environments.
This robotic system is composed of two main elements: a surface vehicle with a geo-radar that is used to scan the ground, so that subterranean obstacles can be detected; and an autonomous underground robot that does the drilling work. “Once the subsoil has been scanned by the rover, using a software developed as part of the project, a work plan is drawn up and an entry and exit point for the work to be carried out is established. The next task consists of taking the robot to the place where the work will be carried out and using it to drill from one point to another”, explains the BADGER project’s technical manager, Santiago Martínez de la Casa, researcher at the RoboticsLab in the UC3M’s Department of Systems Engineering and Automation.
It is estimated that around 500,000 civil works for the installation of wiring, piping and other small-diameter underground scoring are carried out in Europe each year. These works are typically carried out by opening a ditch, extending the pipeline, then filling in the ditch. “The advantage of this robot is that it is possible to carry out the same drilling work without having to open a ditch, which prevents noise, pollution and inconvenience for citizens”, the researcher notes.
Within the framework of this project, funded by the European Union’s Framework Programme for Research, Technological Development and Innovation (GA 731968) and in which scientists from Germany, Spain, Greece, Italy and the United Kingdom are participating, the system has been tested under laboratory conditions. In particular, several underground drilling tests on land in northern Germany as well as in the Community of Madrid have been carried out.
The system prototype has caught the attention of the private sector, of both European and north American companies, and is currently continuing to be developed with the aim of starting tests in real urban environments. Researchers estimate that it could be ready to operate in cities within 2 to 3 years.
More information here.
Interview with the researcher:
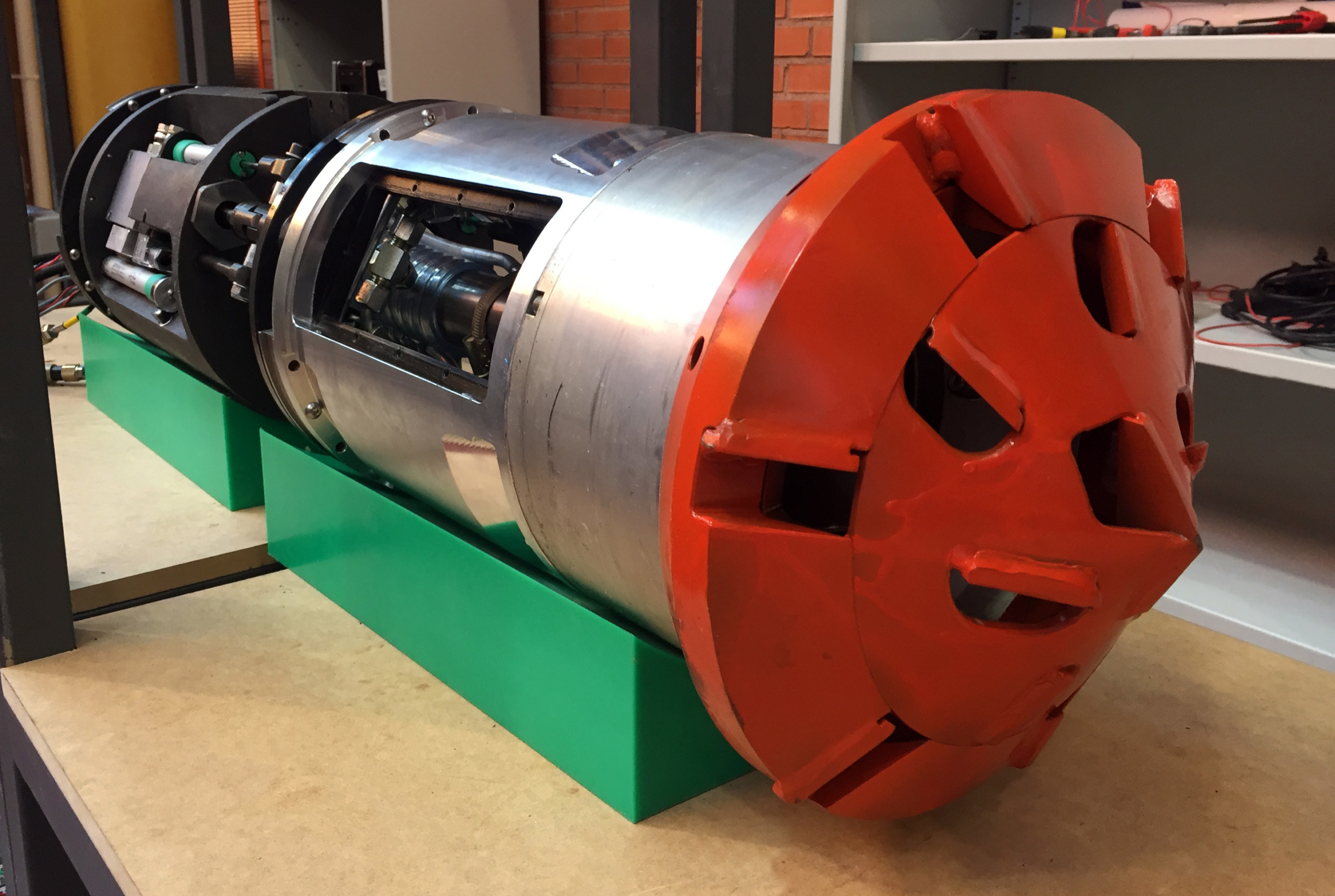
Caption: Badger, a three-metre-long drilling robot consisting of a drilling head, two clamping modules and two propulsion and steering modules. Credit: UC3M.